I. Phép Màu Công Nghệ Hay Sự Phối Hợp Hoàn Hảo?
Bạn đã bao giờ tự hỏi làm thế nào một cỗ máy sắt thép nặng hàng tấn có thể “nhìn” đường, “suy nghĩ” và tự đưa ra quyết định còn “chuẩn” hơn cả một tài xế 20 năm kinh nghiệm chưa? Làm sao nó có thể lướt đi uyển chuyển giữa dòng xe đông đúc, nhận ra một đứa trẻ bất ngờ lao ra đường, hay giữ khoảng cách an toàn một cách chính xác đến từng centimet?
Đó không phải là phép màu. Đằng sau sự “ảo diệu” ấy là một bản giao hưởng công nghệ đỉnh cao, một sự phối hợp hoàn hảo của ba thành phần cốt lõi, ba thế lực hùng mạnh định hình nên tương lai của ngành ô tô. Trong bài viết đầu tiên của series “Nhập môn xe tự hành”, XecoV.Com sẽ cùng bạn vén bức màn bí ẩn về bộ ba quyền lực này: Cảm biến (Sensors), Máy tính trung tâm (Onboard Computer), và Bộ truyền động (Actuators).
Hãy hình dung một cách đơn giản: nếu chiếc xe tự hành là một cơ thể sống, thì bộ ba này chính là Giác quan – Bộ não – Tay chân. Chúng ta hãy cùng nhau “phẫu thuật” để xem chúng hoạt động ra sao nhé!

II. “Bóc Tách” Từng Thành Phần Cốt Lõi
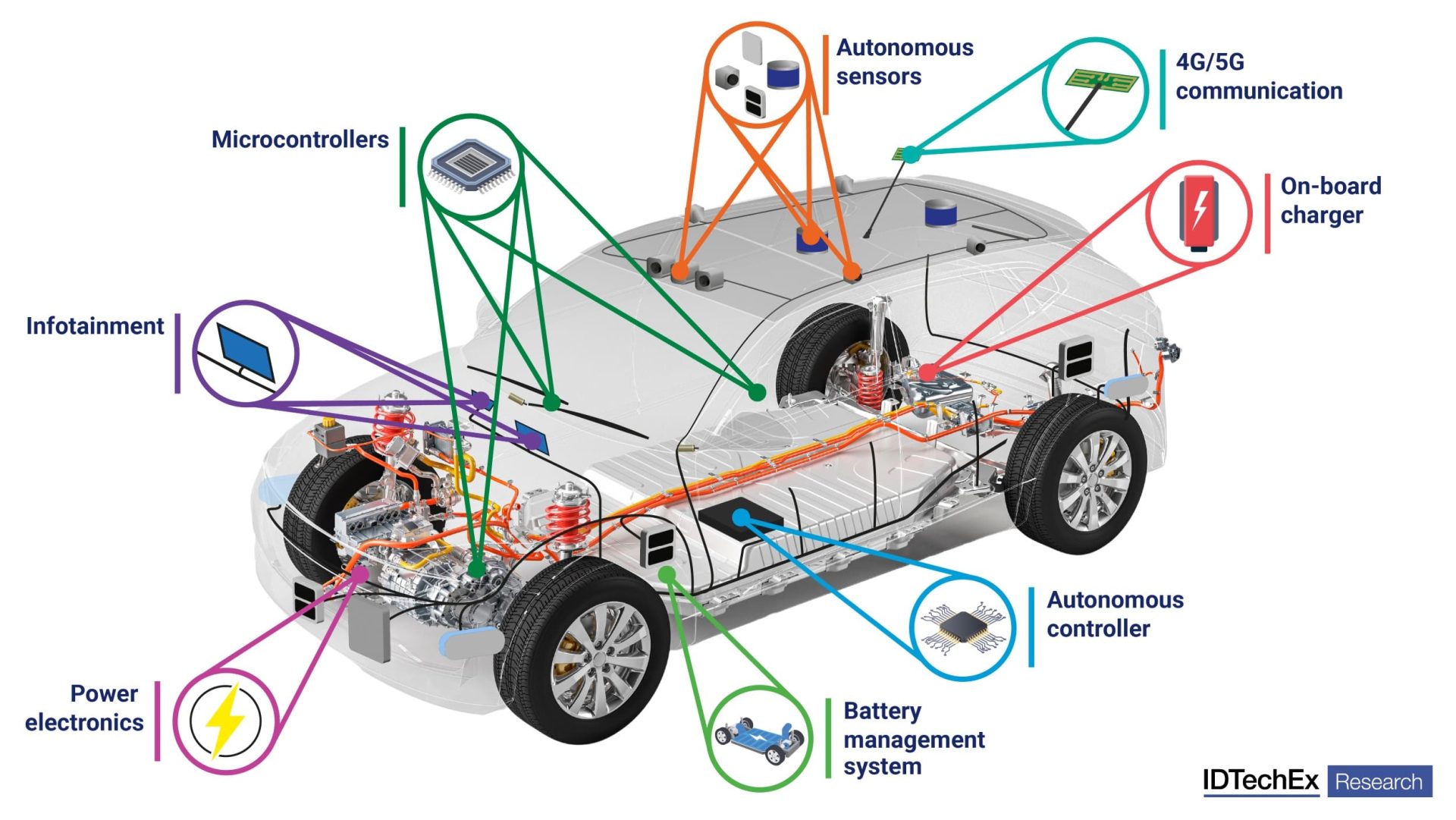
Phần 1: Cảm biến (Sensors) – Con Mắt và Đôi Tai Của Xe Tự Hành
Nếu con người dùng mắt, tai, mũi để cảm nhận thế giới, thì xe tự hành cũng có những “giác quan” công nghệ cao của riêng mình. Vai trò của chúng là thu thập một lượng dữ liệu thô khổng lồ từ môi trường xung quanh, từ đó vẽ nên một bức tranh 360 độ chi tiết về thế giới thực.
1. Camera: Đôi mắt tinh anh nhưng đôi khi “nhòe lệ”
- Nguyên lý hoạt động: Giống hệt như đôi mắt của chúng ta, camera thu nhận hình ảnh màu, giúp hệ thống “nhìn thấy” và nhận diện các đối tượng quan trọng như biển báo giao thông, đèn tín hiệu, vạch kẻ đường, người đi bộ, và các phương tiện khác.
- Ưu điểm: Chi phí tương đối rẻ, cung cấp dữ liệu hình ảnh (contextual data) cực kỳ phong phú và giàu ngữ cảnh mà các cảm biến khác không có được.
- Nhược điểm: Dễ bị “tổn thương”. Hiệu suất của camera suy giảm đáng kể trong điều kiện thời tiết xấu (mưa to, sương mù dày đặc) hoặc môi trường ánh sáng yếu (đêm tối, hầm tối).
- Liên tưởng thực tế: Camera chính là đôi mắt tinh anh của chiếc xe, nhưng đôi khi cũng “nhòe lệ” khi gặp mưa giông hay đêm tối.
2. Radar (Radio Detection and Ranging): Con dơi công nghệ cao
- Nguyên lý hoạt động: Radar không “nhìn”, mà nó “nghe” bằng cách phát ra các sóng vô tuyến. Khi sóng này chạm vào một vật thể và dội lại, radar sẽ tính toán thời gian để xác định chính xác khoảng cách, vận tốc và hướng di chuyển của vật thể đó.
- Ưu điểm: Hoạt động bền bỉ, ổn định trong gần như mọi điều kiện thời tiết (mưa, tuyết, sương mù, bụi bẩn). Đây là “chuyên gia” trong việc đo lường tốc độ và khoảng cách.
- Nhược điểm: Độ phân giải thấp. Radar có thể cho bạn biết có một vật thể ở phía trước và nó đang di chuyển với tốc độ bao nhiêu, nhưng rất khó để nó phân biệt được đó là một chiếc xe hơi hay một tấm biển quảng cáo lớn.
- Liên tưởng thực tế: Radar như một con dơi công nghệ cao, phát sóng để ‘nghe’ thấy chướng ngại vật, bất kể ngày đêm, mưa bão.
3. LiDAR (Light Detection and Ranging): “Thiên lý nhãn” của Tôn Ngộ Không
- Nguyên lý hoạt động: LiDAR là sự kết hợp tinh hoa giữa ánh sáng và radar. Nó phát ra hàng triệu tia laser nhỏ mỗi giây và đo thời gian chúng phản xạ lại từ các bề mặt xung quanh. Kết quả tạo ra một “đám mây điểm” (point cloud) – một bản đồ 3D cực kỳ chi tiết và chính xác của môi trường.
- Ưu điểm: Độ chính xác và chi tiết gần như tuyệt đối. LiDAR có thể “nhìn” rõ hình dáng, kích thước của mọi vật thể, tạo ra một bản đồ 3D không góc chết. Nó là “nhà vua” của việc nhận dạng vật thể và lập bản đồ.
- Nhược điểm: Chi phí vẫn còn khá cao (dù đang giảm nhanh). Các loại LiDAR cơ học truyền thống có các bộ phận quay, kém bền bỉ. Nó cũng có thể bị ảnh hưởng bởi sương mù quá dày hoặc tuyết rơi nặng hạt.
- Liên tưởng thực tế: Nếu Radar là đôi tai, Camera là đôi mắt, thì LiDAR chính là ‘thiên lý nhãn’ của Tôn Ngộ Không, quét ra một thế giới 3D chi tiết đến từng chiếc lá trên cành cây.

4. Các “Giác Quan” Phụ Trợ:
- Cảm biến siêu âm (Ultrasonic Sensors): Giống như radar nhưng dùng sóng âm, thường được trang bị quanh xe để phát hiện các vật thể ở cự ly cực gần, là “trợ thủ đắc lực” khi đỗ xe tự động.
- IMU & GPS: IMU (Inertial Measurement Unit) là “giác quan thăng bằng”, liên tục đo lường gia tốc và hướng di chuyển của xe. Trong khi đó, GPS (Global Positioning System) hoạt động như một “kim chỉ nam”, xác định vị trí tuyệt đối của xe trên bản đồ thế giới.
Sức mạnh của sự tổng hợp (Sensor Fusion):
Không một “giác quan” nào là hoàn hảo. Camera có thể bị “mù” bởi ánh nắng chói chang, Radar không phân biệt được hình dạng, LiDAR gặp khó với mưa lớn. Sức mạnh thực sự nằm ở Sensor Fusion – nghệ thuật kết hợp dữ liệu từ tất cả các cảm biến. “Bộ não” của xe sẽ tổng hợp thông tin, đối chiếu và bù trừ nhược điểm cho nhau, từ đó tạo ra một nhận thức duy nhất, toàn diện và đáng tin cậy nhất về môi trường xung quanh.

Phần 2: Máy tính trung tâm (ECU/Onboard Computer) – Bộ Não Thiên Tài
Toàn bộ dữ liệu từ các “giác quan” sẽ được đổ về đâu? Câu trả lời chính là Máy tính trung tâm – bộ não thiên tài của chiếc xe. Đây là nơi diễn ra những quy trình xử lý phức tạp nhất, từ việc hiểu thế giới xung quanh đến việc ra quyết định và gửi lệnh đi.
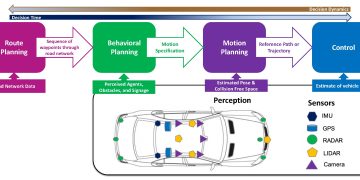
Bên trong “bộ não” này là một chuỗi xử lý thông minh gồm 4 tầng:
- Perception (Nhận thức): Ở tầng này, bộ não sẽ “dịch” hàng terabyte dữ liệu thô từ cảm biến thành những thông tin có ý nghĩa. Nó trả lời câu hỏi: “Tôi đang nhìn thấy cái gì?” – ví dụ: Kia là một chiếc xe tải màu đỏ, cách 50m, đang chạy vận tốc 60km/h. Đây là một người đi bộ đang chuẩn bị qua đường.
- Localization (Định vị): Xe tự hành cần biết chính xác nó đang ở đâu, không phải chỉ trên bản đồ Google Maps thông thường, mà trên một bản đồ 3D siêu chi tiết (HD Map) với sai số chỉ vài centimet. Bằng cách đối chiếu dữ liệu LiDAR/Camera với HD Map, nó trả lời câu hỏi: “Tôi đang ở chính xác vị trí nào trên làn đường này?”
- Planning (Lập kế hoạch): Dựa trên những gì đã nhận thức và vị trí của mình, bộ não bắt đầu vạch ra kịch bản. Nó dự đoán hành vi của các phương tiện khác và lập kế hoạch cho quỹ đạo di chuyển (Path Planning) an toàn, mượt mà và hiệu quả nhất trong vài giây tới. Nó trả lời câu hỏi: “Tôi nên làm gì tiếp theo? Tăng tốc, giảm tốc, giữ nguyên tốc độ, hay chuyển làn?”
- Control (Điều khiển): Sau khi đã có kế hoạch, bộ não sẽ gửi các lệnh cụ thể, dứt khoát đến “tay chân” của chiếc xe. Ví dụ: Gửi lệnh đến hệ thống lái: “Xoay vô lăng sang phải 5 độ”. Gửi lệnh đến hệ thống phanh: “Tác động một lực phanh 30%”.
Để thực hiện những nhiệm vụ này, “bộ não” của xe tự hành đòi hỏi một sức mạnh tính toán khổng lồ, dẫn đến sự ra đời của các con chip chuyên dụng từ những gã khổng lồ công nghệ như NVIDIA (Drive), Intel (Mobileye), và Qualcomm (Snapdragon Ride).
- Liên tưởng thực tế: Hãy tưởng tượng bộ não này phải là một kỳ thủ cờ vua đại tài, một nhà hoạch định chiến lược quân sự và một tay đua F1 cùng một lúc – nó phải tính toán hàng tỷ phép tính mỗi giây để đưa ra nước đi tiếp theo chỉ trong một phần nghìn giây.
Phần 3: Bộ truyền động (Actuators) – Tay Chân Mẫn Cán
Nếu máy tính trung tâm là bộ não ra lệnh, thì Bộ truyền động (Actuators) chính là những cơ cấu cơ-điện tử mẫn cán, trực tiếp thực thi mệnh lệnh đó. Đây là “tay chân” của chiếc xe.
Các hệ thống truyền động chính hoạt động theo cơ chế “by-wire” (điều khiển bằng tín hiệu điện):
- Hệ thống lái (Steering-by-wire): Nhận lệnh từ máy tính để điều khiển chính xác góc quay của bánh xe.
- Hệ thống phanh (Brake-by-wire): Nhận lệnh để điều khiển lực phanh ở từng bánh xe.
- Hệ thống ga (Throttle-by-wire): Nhận lệnh để điều khiển công suất động cơ (đối với xe xăng) hoặc mô-tơ điện.
Yếu tố sống còn đối với các hệ thống này là độ trễ cực thấp (low latency) và độ tin cậy tuyệt đối. Một sai sót hay một phần nghìn giây chậm trễ trong việc thực thi lệnh cũng có thể dẫn đến những hậu quả thảm khốc.

III. Tầm Nhìn và Xu Hướng Phát Triển
“Bộ ba quyền lực” này không ngừng tiến hóa:
- Tích hợp và thu nhỏ: Cảm biến đang ngày càng nhỏ gọn, mạnh mẽ và quan trọng nhất là rẻ hơn. Công nghệ LiDAR thể rắn (Solid-state LiDAR) không có bộ phận chuyển động đang dần thay thế LiDAR cơ học cồng kềnh, hứa hẹn độ bền cao và giá thành tốt hơn.
- AI và Học sâu (Deep Learning): “Bộ não” đang ngày càng thông minh hơn. Nhờ các thuật toán AI tiên tiến, xe tự hành có thể tự “học” từ hàng triệu km di chuyển trong thế giới thực và trong môi trường giả lập, giúp nó xử lý các tình huống bất ngờ ngày một tốt hơn.
- Sự trỗi dậy của “Bộ não trung tâm”: Các hãng xe đang dần từ bỏ kiến trúc hàng trăm ECU nhỏ lẻ để hướng tới một Nền tảng Máy tính Tập trung (Centralized Computing Platform). Điều này không chỉ tăng hiệu suất mà còn cho phép cập nhật phần mềm cho toàn bộ xe qua mạng Internet (OTA – Over-the-Air), giống như cách bạn cập nhật chiếc smartphone của mình.
- Giao tiếp V2X (Vehicle-to-Everything): Trong tương lai không xa, xe tự hành không chỉ “nhìn” bằng cảm biến. Chúng còn có thể “nói chuyện” với nhau (V2V), với cơ sở hạ tầng giao thông như đèn tín hiệu (V2I), và với mọi thứ khác (V2X). Điều này tạo ra một “tầm nhìn” vượt xa phạm vi của cảm biến vật lý, giúp xe biết trước những gì đang xảy ra ở góc khuất phía trước.
IV. Kết Luận: Nền Tảng Của Tương Lai
Hành trình của một chiếc xe tự hành, từ việc “cảm nhận” thế giới xung quanh đến việc “đưa ra quyết định” và “hành động”, là một bản giao hưởng phức tạp được chỉ huy bởi bộ ba không thể tách rời: Cảm biến – Máy tính – Bộ truyền động. Chúng là nền móng, là xương sống cho toàn bộ cuộc cách mạng xe tự hành.
Hiểu rõ vai trò và sự phối hợp của chúng chính là bước đầu tiên để chúng ta làm chủ công nghệ, giải mã những chiếc xe của tương lai. Đây mới chỉ là điểm khởi đầu trên chặng đường khám phá đầy thú vị này.
Trong bài viết tiếp theo của series, chúng ta sẽ cùng nhau tìm hiểu sâu hơn về “Các cấp độ tự hành: Từ trợ lý tài xế đến ‘bác tài’ AI thực thụ”. Hẹn gặp lại các bạn độc giả của XecoV.Com!






{kind=link}