Tại sao những kilômét ‘ảo’ đôi khi còn giá trị hơn cả những dặm đường thật?
Phần 1: Hàng tỷ dặm đường không cần một giọt xăng
Để chứng minh an toàn hơn con người, một hệ thống xe tự hành cần chạy bao nhiêu km? Waymo, gã khổng lồ trong ngành, nói rằng con số đó lên đến hàng tỷ. Lái xe ngoài đời thực để đạt được điều đó sẽ mất hàng thế kỷ, tiêu tốn hàng tỷ đô la và vô cùng rủi ro. Vậy đâu là bí quyết? Câu trả lời nằm ở hai chữ: Mô phỏng (Simulation).
Đây không phải là một trò chơi, mà là một cuộc cách mạng. Hôm nay, hãy cùng XecoV thâm nhập vào ‘sân tập ảo’ không giới hạn này, nơi những ‘tài xế’ AI được tôi luyện qua những thử thách khắc nghiệt nhất trước khi được cấp ‘bằng lái’ ra thế giới thực.

Phần 2: Mô phỏng không chỉ là “Game lái xe đồ họa đẹp”
Nhiều người lầm tưởng mô phỏng cho xe tự hành chỉ là một phiên bản cao cấp của game đua xe. Theo góc nhìn của chúng tôi tại XecoV, sự khác biệt giữa chúng cũng lớn như khoảng cách giữa một diễn viên đóng thế và một phi công thực thụ. Game cần “nhìn đẹp”, còn mô phỏng thì phải “đúng như thật” ở cấp độ vi mô.
2.1: Giải mã độ trung thực (High-Fidelity)
Độ trung thực là linh hồn của mô phỏng. Nó không chỉ tái tạo hình ảnh, mà còn tái tạo các quy luật vật lý và cách thế giới vận hành.
- Mô phỏng Vật lý: Chiếc xe ảo phải tuân thủ nghiêm ngặt các định luật vật lý. Độ bám của bốn bánh xe trên mặt đường nhựa khô sẽ khác hoàn toàn khi trời mưa, và khác một trời một vực trên băng tuyết. Quán tính của chiếc xe nặng 2 tấn khi phanh gấp ở tốc độ cao phải được tính toán chính xác đến từng mili giây.
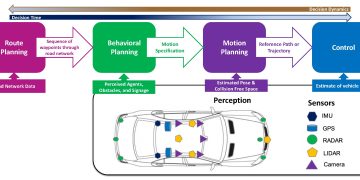
- Mô phỏng Cảm biến: Đây là yếu tố then chốt. Mô phỏng phải tái tạo chính xác những “khuyết điểm” của cảm biến: cách chùm tia LiDAR bị “nhiễu” và tán xạ bởi một cơn mưa rào, cách camera bị “lóa” hoàn toàn bởi ánh mặt trời lúc hoàng hôn, hay cách sóng radar có thể “nhìn” xuyên qua sương mù nhưng lại bị “dội” lại bởi một hàng rào kim loại.
- Mô phỏng Hành vi: Thế giới ảo phải hỗn loạn như thế giới thật. Các phương tiện và người đi bộ ảo (được gọi là AI agents) phải hành xử một cách tự nhiên, khó đoán. Chúng có thể đột ngột chuyển làn không xi nhan, phanh gấp vô cớ, hay thậm chí là “ngáo” như một người lái xe đang mất tập trung. Chúng không được phép chỉ đi theo một đường thẳng được lập trình sẵn.
2.2: Các cấp độ “nhập vai” của AI
Tùy vào mục đích thử nghiệm, bộ não AI sẽ được “nhúng” vào thế giới ảo theo những cách khác nhau:
- Software-in-the-Loop (SIL): Ở cấp độ này, toàn bộ “bộ não” AI (phần mềm điều khiển) là một chương trình chạy hoàn toàn bên trong máy chủ, cùng với môi trường ảo. “Đây là giấc mơ của AI, nơi nó tin rằng mình đang lái xe thật sự, cảm nhận con đường và phản ứng với các tình huống, tất cả đều diễn ra trong một thế giới số,” XecoV ví von như vậy.
- Hardware-in-the-Loop (HIL): Đây là một bước tiến gần hơn đến thực tế. Người ta sẽ lấy chính “bộ não” AI vật lý (con chip máy tính thật, bộ xử lý sẽ được lắp trên xe) và kết nối nó với một hệ thống máy tính chạy môi trường mô phỏng. Giống như phi công ngồi trong buồng lái mô phỏng, mọi nút bấm, cần gạt là thật, bộ não xử lý là thật, chỉ có thế giới bên ngoài cửa sổ là ảo. Điều này đảm bảo phần mềm hoạt động đúng trên phần cứng thực tế của xe.

Phần 3: “Chén Thánh” Mô phỏng – 3 Siêu năng lực thay đổi cuộc chơi
Vậy tại sao mô phỏng lại quan trọng đến thế? XecoV nhận định đây là yếu tố thay đổi cuộc chơi, bởi nó trao cho các nhà phát triển 3 siêu năng lực mà thế giới thực không thể có.
3.1: Quy mô & Tốc độ: Chạy 1 triệu km trong 1 ngày
Thay vì chỉ có một đội xe vài trăm chiếc chạy ngoài đường, một công ty như Waymo hay Cruise có thể vận hành hàng chục ngàn chiếc xe ảo cùng một lúc trên các máy chủ đám mây, 24/7. Những chiếc xe này có thể chạy nhanh hơn thời gian thực. Nhờ sức mạnh của việc chạy song song, lượng kinh nghiệm và dữ liệu mà chúng thu thập được chỉ trong một ngày có thể tương đương với quãng đường của cả đời người lái xe.
3.2: An toàn tuyệt đối: Thử nghiệm “Tận thế” không chút rủi ro
Đây là giá trị không thể đong đếm của mô phỏng. Nó cho phép các kỹ sư tạo ra những kịch bản “trời ơi đất hỡi” (edge cases) cực kỳ nguy hiểm để dạy cho AI. Những tình huống mà ngoài đời thực, chúng ta không bao giờ muốn thử, dù chỉ một lần:
- Một chiếc lốp xe từ xe tải phía trước bất ngờ văng ra ở tốc độ 100km/h.
- Một đứa trẻ đuổi theo quả bóng lăn bất ngờ ra từ sau một chiếc xe đang đỗ khuất tầm nhìn.
- Gặp một ngã tư mà tất cả đèn tín hiệu đều hỏng và có một chiếc xe cứu thương đang hú còi lao tới từ hướng giao cắt.
- Lái xe trong một trận bão tuyết với tầm nhìn gần như bằng không.
Góc nhìn XecoV: “Chúng tôi tin rằng, giá trị cốt lõi của mô phỏng nằm ở chính khả năng ‘tra tấn’ AI bằng những tình huống hy hữu này. Việc lặp lại chúng hàng ngàn lần với những biến thể khác nhau để dạy cho AI cách xử lý dứt khoát và an toàn là điều mà không một cuộc thử nghiệm thực tế nào có thể đánh đổi.”

3.3: Đo lường & Tự động hóa: “Bài thi” công bằng cho AI
Trong thế giới thực, không có hai tình huống nào giống hệt nhau. Nhưng trong mô phỏng, kỹ sư có thể thiết lập một “bài thi” chuẩn, ví dụ: bài thi nhập làn trên cao tốc vào giờ cao điểm. Sau đó, họ có thể cho ‘thí sinh’ AI chạy bài thi này 10,000 lần, mỗi lần với các biến số ngẫu nhiên một chút (chiếc xe phía sau nhanh hơn, chiếc xe bên cạnh tạt đầu bất ngờ…). Mọi thông số đều được ghi lại và phân tích một cách khách quan, giúp tìm ra điểm yếu trong thuật toán và cải thiện phần mềm một cách hệ thống, khoa học.
Phần 4: Vòng lặp Vàng: Từ Ảo ra Thực và ngược lại
Mô phỏng và thử nghiệm thực tế không loại trừ nhau, chúng bổ trợ cho nhau trong một quy trình phát triển chuyên nghiệp.
- Một chiếc xe thử nghiệm lái xe ngoài đời thực và gặp phải một tình huống khó, bất ngờ mà nó xử lý chưa tốt.
- Các kỹ sư thu thập toàn bộ dữ liệu từ cảm biến và tái tạo chính xác tình huống đó trong mô phỏng.
- Họ huấn luyện AI với hàng ngàn biến thể của tình huống đó trong thế giới ảo cho đến khi nó học được cách xử lý hoàn hảo trong mọi trường hợp.
- Phiên bản phần mềm đã “tốt nghiệp” được cập nhật trở lại vào xe thật để kiểm chứng và tiếp tục hành trình học hỏi.
XecoV nhận định: “Đây chính là ‘vòng lặp vàng’ khép kín, là cỗ máy học hỏi không ngừng, giúp biến mỗi sai lầm hiếm hoi ngoài đời thực thành một bài học kinh nghiệm được nhân lên hàng triệu lần trong thế giới ảo.”

Phần 5: Giới hạn và Tương lai của Mô phỏng
Tuy nhiên, phải thẳng thắn thừa nhận rằng mô phỏng không phải là vạn năng. Thách thức lớn nhất là “Sim-to-Real Gap” – khoảng cách giữa thế giới ảo và thế giới thực. Mô phỏng có thể tái tạo vật lý rất tốt, nhưng việc mô phỏng 100% các hành vi xã hội tinh vi, những tương tác bằng mắt hay những quyết định phi logic của con người vẫn là một bài toán cực khó.
Tương lai của lĩnh vực này nằm ở AI tạo sinh (Generative AI). Các công nghệ mới sẽ giúp tự động tạo ra vô vàn kịch bản mô phỏng đa dạng, thực tế và khó lường hơn nữa. Thế giới mô phỏng sẽ ngày càng trở thành một “Bản sao số” (Digital Twin) hoàn hảo của thế giới thực.
Kết luận
Vậy là chúng ta đã vén màn bí mật về thế giới mô phỏng. Đó không phải trò chơi, mà là một “võ đường” an toàn để AI rèn luyện, một “phòng thí nghiệm” quy mô lớn để thử nghiệm những điều không thể, và một “cỗ máy thời gian” giúp tăng tốc quá trình học hỏi lên hàng triệu lần.
Lần tới khi bạn nghe một hãng xe tự hành công bố đã chạy hàng tỷ dặm, hãy nhớ rằng phần lớn những dặm đường đó được tạo nên từ silicon và những dòng code. Theo quan điểm của XecoV, đó không phải là một sự khoe khoang, mà là một lời cam kết. Lời cam kết rằng sự an toàn đã được tôi luyện đến mức cao nhất trong thế giới ảo, trước khi họ dám đặt niềm tin vào bất kỳ bánh xe nào lăn trên đường thật.






{kind=link}
Discussion about this post