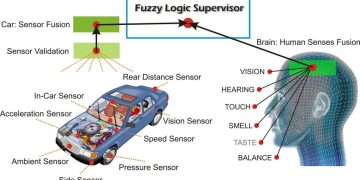






Sensor Fusion (Hợp nhất cảm biến) là quá trình mà bộ não máy tính của xe tự hành lấy dữ liệu từ nhiều loại cảm biến khác nhau, sau đó tổng hợp chúng lại để tạo ra một mô hình 3D duy nhất, phong phú, chính xác và đáng tin cậy hơn nhiều so với việc chỉ sử dụng một cảm biến riêng lẻ.
Đây là nguyên tắc nền tảng: Điểm yếu của cảm biến này sẽ được bù đắp bằng điểm mạnh của cảm biến khác. Hãy cùng gặp gỡ “bộ ba giác quan” cốt lõi của hầu hết các xe tự hành hiện nay.

1. Gặp gỡ “Bộ Ba Giác Quan” của Xe Tự Hành
A. Camera – “Đôi Mắt Tinh Tường”
- Nó làm gì? Giống như mắt người, camera cung cấp hình ảnh màu sắc, có độ phân giải cao về thế giới xung quanh.
- Điểm mạnh:
- Nhận diện màu sắc: Cực kỳ quan trọng để “đọc” tín hiệu đèn giao thông, biển báo.
- Phân loại chi tiết: Có thể phân biệt rõ giữa một người đi bộ, một người đi xe đạp, và một chiếc xe máy.
- Chi phí thấp: Là loại cảm biến có giá thành rẻ nhất.
- Điểm yếu:
- Hoạt động kém trong điều kiện khắc nghiệt: Bị hạn chế bởi mưa lớn, sương mù, tuyết rơi.
- Nhạy cảm với ánh sáng: Gặp khó khăn khi trời quá tối hoặc bị lóa bởi ánh nắng mặt trời.
- Khó đo khoảng cách chính xác: Ước tính khoảng cách không tốt bằng các cảm biến khác.

B. Radar – “Đôi Tai Thính Nhạy”
- Nó làm gì? Radar (Radio Detection and Ranging) phát ra sóng radio và đo thời gian chúng phản xạ lại.
- Điểm mạnh:
- Hoạt động tốt trong mọi thời tiết: Sóng radio có thể xuyên qua mưa, tuyết, sương mù, bụi bẩn, giúp xe “nhìn” được trong những điều kiện mà camera “bó tay”.
- Đo vận tốc xuất sắc: Rất giỏi trong việc phát hiện các vật thể đang chuyển động và đo chính xác vận tốc của chúng (hiệu ứng Doppler).
- Điểm yếu:
- Độ phân giải thấp: Chỉ có thể “thấy” các vật thể dưới dạng những đốm mờ, không thể nhận dạng chi tiết hình dạng hay phân loại chúng.
- Dễ bị nhiễu bởi vật thể kim loại: Đôi khi gặp khó khăn trong việc phân biệt giữa một chiếc lon nước ngọt và một tảng đá trên đường.
C. LiDAR – “Xúc Giác Không Gian 3D”
- Nó làm gì? LiDAR (Light Detection and Ranging) phát ra hàng triệu tia laser mỗi giây và đo thời gian chúng quay trở lại để tạo ra một “đám mây điểm” (point cloud) – một bản đồ 3D cực kỳ chi tiết về môi trường xung quanh.
- Điểm mạnh:
- Đo khoảng cách siêu chính xác: Cung cấp thông tin kích thước và khoảng cách với độ chính xác đến từng centimet.
- Tạo bản đồ 3D chi tiết: “Vẽ” lại hình dạng của mọi vật thể, từ chiếc lá cây đến toàn bộ tòa nhà.
- Hoạt động tốt trong bóng tối: Vì tự phát ra ánh sáng của riêng mình, LiDAR không phụ thuộc vào điều kiện ánh sáng môi trường.
- Điểm yếu:
- Chi phí cao: Thường là loại cảm biến đắt nhất trong bộ ba.
- Bị ảnh hưởng bởi thời tiết xấu: Giống như mắt người, tia laser có thể bị tán xạ bởi các giọt nước mưa dày đặc hoặc sương mù.
- Không nhận diện được màu sắc: Không thể đọc được tín hiệu đèn giao thông hay biển báo.

2. Sức mạnh của Hợp nhất: Khi 1 + 1 + 1 > 3
Sensor Fusion không chỉ là việc đặt các dữ liệu cạnh nhau, mà là quá trình tổng hợp thông minh để tạo ra một nhận thức vượt trội.
Kịch bản thực tế: Một chiếc xe tự hành đang di chuyển trên đường vào lúc chạng vạng tối.
- Camera: “Thấy một vật thể tối, có hình dạng giống người đang ở bên lề đường, nhưng hình ảnh hơi mờ và nhiễu do thiếu sáng.”
- Radar: “Xác nhận có một vật thể ở vị trí đó, đang đứng yên, không di chuyển.”
- LiDAR: “Tạo ra một bản đồ 3D chính xác, xác nhận đây là một vật thể cao 1m7, có hình dạng con người, đang đứng ở khoảng cách chính xác là 30.5 mét.”
Kết quả sau khi Hợp nhất (Fusion): Bộ não của xe kết luận với độ chắc chắn cực cao: “Đây là một người trưởng thành đang đứng yên bên lề đường, ở khoảng cách 30.5 mét.” Nhờ đó, xe sẽ tự động điều chỉnh quỹ đạo để đi cách xa người đó một khoảng an toàn.
Nếu chỉ có camera, xe có thể không chắc chắn. Nếu chỉ có radar, xe không biết đó là người hay cột điện. Nếu chỉ có LiDAR, xe không biết biển báo bên cạnh người đó có màu gì. Chỉ khi kết hợp cả ba, bức tranh mới trở nên hoàn chỉnh và đáng tin cậy.

3. Kết luận
Không có một giác quan nào là hoàn hảo. Đôi mắt có thể bị lừa dối, đôi tai có thể nghe nhầm. Tương tự, không có một loại cảm biến nào có thể một mình đảm bảo an toàn tuyệt đối cho xe tự hành trong mọi tình huống.
Sensor Fusion chính là nghệ thuật kết hợp các điểm mạnh và loại bỏ các điểm yếu của từng cảm biến, tạo ra một hệ thống nhận thức tổng thể mạnh mẽ, chính xác và có khả năng dự phòng cao. Đó là cách xe tự hành xây dựng lòng tin, không phải bằng một “giác quan” đơn lẻ, mà bằng sự hợp tác thông minh của cả một “bộ ba giác quan” hùng mạnh.
Trong bài viết tiếp theo, chúng ta sẽ khám phá một kênh thông tin khác, khi xe tự hành không chỉ “nhìn” mà còn có thể “nói chuyện” với thế giới xung quanh:
“V2X – Giao tiếp Vạn vật: Khi xe tự hành ‘nói chuyện’ với nhau và với cơ sở hạ tầng.”
- Xe tự hành là gì? Một định nghĩa đơn giản cho người mới bắt đầu
- Lịch sử xe tự hành: Từ những ý tưởng khoa học viễn tưởng đầu tiên đến các cuộc thử nghiệm của DARPA
- Tại sao chúng ta cần xe tự hành? Phân tích 10 lợi ích và tiềm năng lớn nhất
- SAE J3016: ‘Bản Hiến Pháp’ Của Thế Giới Xe Tự Hành – Phân Tích Toàn Diện 6 Cấp Độ
- ADAS và Xe Tự Hành: Sự Thật Đằng Sau Lời Quảng Cáo “Tự Lái”
- ODD – Operational Design Domain là gì? “Sân chơi” quy định khả năng hoạt động của xe tự hành
- “Sensor Fusion” – Hợp nhất cảm biến: Cách xe tự hành kết hợp LiDAR, Camera và Radar để “hiểu” thế giới




{kind=link}